QUESTION IMAGE
Question
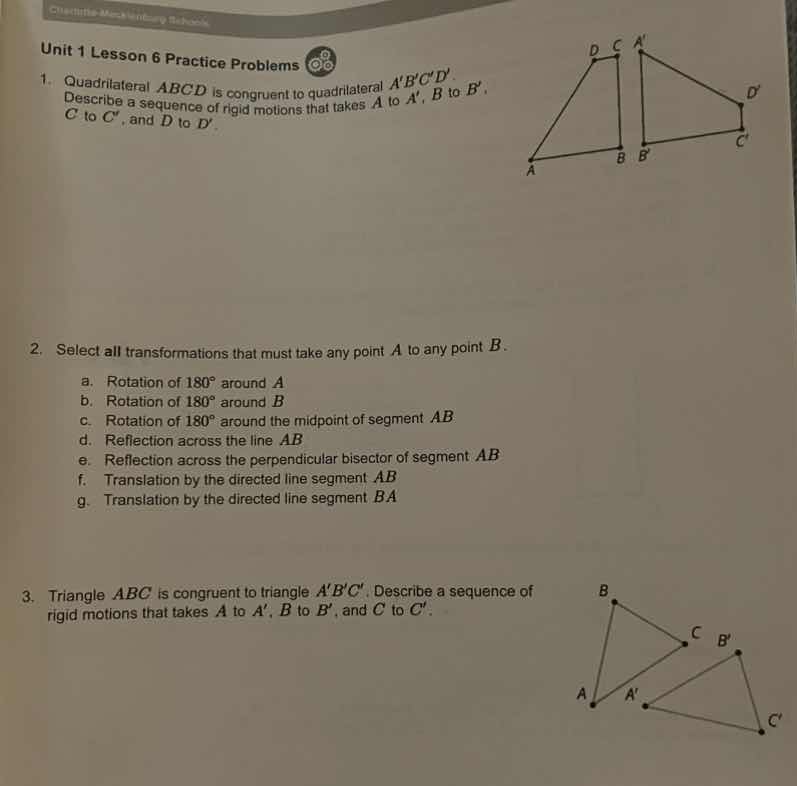
unit 1 lesson 6 practice problems
- quadrilateral abcd is congruent to quadrilateral abcd. describe a sequence of rigid motions that takes a to a, b to b, c to c, and d to d.
- select all transformations that must take any point a to any point b.
a. rotation of 180° around a
b. rotation of 180° around b
c. rotation of 180° around the midpoint of segment ab
d. reflection across the line ab
e. reflection across the perpendicular bisector of segment ab
f. translation by the directed line segment ab
g. translation by the directed line segment ba
- triangle abc is congruent to triangle abc. describe a sequence of rigid motions that takes a to a, b to b, and c to c.
Problem 1
Step1: Identify the first rigid motion (Translation)
Looking at the positions of \( B \) and \( B' \), we can first translate quadrilateral \( ABCD \) along the vector \( \overrightarrow{BB'} \) so that \( B \) maps to \( B' \). Let's assume the horizontal distance from \( B \) to \( B' \) is some value, say \( x \), so we translate the quadrilateral by \( x \) units to the right (depending on the diagram, but visually, \( B \) to \( B' \) is a horizontal shift).
Step2: Identify the second rigid motion (Reflection or Rotation, here Reflection)
After translating \( B \) to \( B' \), we can reflect the translated quadrilateral over the line \( B'A' \) (or a vertical line through \( B' \)) to map \( A \) to \( A' \), \( C \) to \( C' \), and \( D \) to \( D' \). Alternatively, since the figures are adjacent and look like a reflection over the vertical line through \( B' \) after translation. So first, translate \( ABCD \) so that \( B \) moves to \( B' \) (translation by \( \overrightarrow{BB'} \)), then reflect over the vertical line through \( B' \) (or \( A' \)) to get \( A'B'C'D' \).
- Option a: Rotation of \( 180^\circ \) around \( A \): This would map \( A \) to itself, not to \( B \) (unless \( A = B \), but the problem says "any point \( A \) to any point \( B \)"), so incorrect.
- Option b: Rotation of \( 180^\circ \) around \( B \): This would map \( B \) to itself, not \( A \) to \( B \) (unless \( A = B \)), so incorrect.
- Option c: Rotation of \( 180^\circ \) around the midpoint of \( AB \): Let \( M \) be the midpoint of \( AB \). A \( 180^\circ \) rotation around \( M \) takes \( A \) to \( B \) because \( M \) is the midpoint, so \( AM = MB \) and the rotation swaps \( A \) and \( B \), correct.
- Option d: Reflection across the line \( AB \): Reflecting \( A \) over line \( AB \) keeps \( A \) on the line, so it maps \( A \) to itself (if \( A \) is on the line), not to \( B \) (unless \( A = B \)), so incorrect.
- Option e: Reflection across the perpendicular bisector of \( AB \): The perpendicular bisector of \( AB \) is the set of points equidistant from \( A \) and \( B \). Reflecting \( A \) over the perpendicular bisector of \( AB \) will map \( A \) to \( B \) because the perpendicular bisector is the axis of symmetry between \( A \) and \( B \), correct.
- Option f: Translation by the directed line segment \( \overrightarrow{AB} \): Translating \( A \) by \( \overrightarrow{AB} \) means adding the vector \( AB \) to \( A \)'s position, which gives \( B \) (since \( A + \overrightarrow{AB}=B \)), correct.
- Option g: Translation by the directed line segment \( \overrightarrow{BA} \): Translating \( A \) by \( \overrightarrow{BA} \) gives \( A + \overrightarrow{BA}=A - \overrightarrow{AB} \), which is not \( B \), so incorrect.
- Wait, correction for option c: Wait, rotation \( 180^\circ \) around midpoint \( M \) of \( AB \): Let \( M=\frac{A + B}{2} \) (in coordinate terms). Rotating \( A \) \( 180^\circ \) around \( M \): The formula for \( 180^\circ \) rotation around \( M \) is \( P' = 2M - P \). So for \( P = A \), \( P' = 2M - A=2\times\frac{A + B}{2}-A = A + B - A=B \). So that works. For option e: Reflection over perpendicular bisector of \( AB \): The perpendicular bisector is the line where any point on it is equidistant from \( A \) and \( B \), and reflecting \( A \) over this line swaps \( A \) and \( B \), so that works. For option f: Translation by \( \overrightarrow{AB} \): \( A + \overrightarrow{AB}=B \), so that works. Wait, earlier I thought option c was correct, let's re - check:
Wait, the problem says "must take any point \( A \) to any point \( B \)". Let's re - analyze each option:
- a: Rotation \( 180^\circ \) around \( A \): \( A \) maps to \( A \), not \( B \) (unless \( A = B \)), so no.
- b: Rotation \( 180^\circ \) around \( B \): \( A \) maps to a point \( A' \) such that \( B \) is the midpoint of \( A A' \), so \( A'=2B - A \), which is not \( B \) (unless \( A = B \)), so no.
- c: Rotation \( 180^\circ \) around midpoint \( M \) of \( AB \): As shown above, \( A \) maps to \( B \), and this works for any \( A \) and \( B \), so yes.
- d: Reflection across line \( AB \): \( A \) is on line \( AB \), so reflection across \( AB \) maps \( A \) to \( A \), not \( B \) (unless \( A = B \)), so no.
- e: Reflection across perpendicular bisector of \( AB \): The perpendicular bisector is the line of symmetry between \( A \) and \( B \), so reflecting \( A \) over it gives \( B \), works for any \( A \) and \( B \), so yes.
- f: Translation by \( \overrightarrow{AB} \): \( A+\overrightarrow{AB}=B \), works for any \…
Step1: Identify the first rigid motion (Translation)
Looking at the positions of \( A \) and \( A' \), we can first translate triangle \( ABC \) along the vector \( \overrightarrow{AA'} \) so that \( A \) maps to \( A' \). Let the vector from \( A \) to \( A' \) be \( \vec{v} \), so we translate \( ABC \) by \( \vec{v} \).
Step2: Identify the second rigid motion (Rotation or Reflection, here Rotation)
After translating \( A \) to \( A' \), we can rotate the translated triangle around \( A' \) by an angle equal to the angle between \( AB \) and \( A'B' \) to map \( B \) to \( B' \) and \( C \) to \( C' \). Alternatively, since the triangles are congruent and \( A \) to \( A' \) is a translation, then a rotation around \( A' \) to align \( AB \) with \( A'B' \) and \( AC \) with \( A'C' \). So first, translate triangle \( ABC \) by the vector \( \overrightarrow{AA'} \) (so \( A \) maps to \( A' \)), then rotate the translated triangle around \( A' \) by the angle \( \angle B A'B' \) (or the angle between \( AB \) and \( A'B' \)) to map \( B \) to \( B' \) and \( C \) to \( C' \).

Snap & solve any problem in the app
Get step-by-step solutions on Sovi AI
Photo-based solutions with guided steps
Explore more problems and detailed explanations
First, translate quadrilateral \( ABCD \) along the vector \( \overrightarrow{BB'} \) (so \( B \) maps to \( B' \)), then reflect the translated quadrilateral over the line containing \( A'B' \) (a vertical line, typically) to map \( A \) to \( A' \), \( C \) to \( C' \), and \( D \) to \( D' \). (The exact sequence can be adjusted based on the diagram's precise measurements, but this is the general rigid motion sequence.)